The raw vendor files you specify as input must be in a format that can be read by CATALYST Enterprise.
Before you process data with CATALYST Enterprise Aerial you must confirm that:
- Correct Level 3 data is available
- Aerial triangulation (AT) is correct; that it is for the camera, not the aircraft
- Camera calibration is correct for the camera and aircraft combination
Your first task in processing imagery is to prepare the data for ingestion with CATALYST Enterprise. This consists of preparing a camera-calibration file and preparing an exterior-orientation file.
The camera-calibration file contains all the necessary camera parameters to perform photogrammetric processes. The mandatory parameters are:
- Focal length of the camera
- Chip size of the charge-coupled device (CCD) of the camera
The camera-calibration parameters can often be acquired from a calibration report provided by the manufacturer of the device. For more information on preparing the camera-calibration file, see Data structure of aerial imagery.
The exterior-orientation file contains all the information necessary for the transformation between the photo-coordinate system and the ground-coordinate system. The information consists of the position and orientation of the camera during image acquisition. The mandatory parameters are:
- Image ID: A unique identifier employing preferably a naming convention sequenced by acquisition time or flight line.
- Positioning (x, y, and z): The easting, northing, and height position of the camera.
- Orientation (o, p, and k): The omega (x-axis rotation), phi (y-axis rotation), and kappa (z-axis rotation) orientation of the camera.
For more information on preparing the exterior-orientation file, see Data structure of aerial imagery.
Figure 1. Typical workflow of preparing data
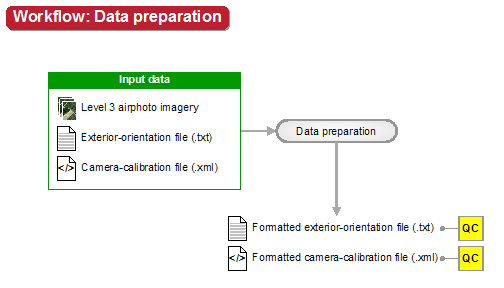
After preparing the camera-calibration file and the exterior-orientation file, you can perform a variety of quality-control (QC) tasks, as necessary, such as:
- Verifying and identify important characteristics of the exterior orientation.
- Inspecting the position (x, y) of each image.
- Inspecting the position (x, y) of each image with a base map.
- Verifying the camera parameters.
For more information, see: